
 |
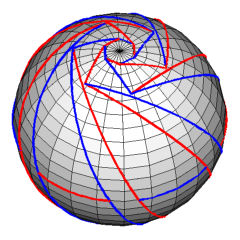
| Figure 1: The graph G |
 |
| Figure 2: Two local colorings |
 |
| Figure 3 |
 |
| Figure 4: Hyperbolic virtual polytope |
A pointed graph on the sphere which leads to a counterexample to A.D. Alexandrov's conjecture.
We present a graph G embedded in the sphere S2 such that:
It is pretty difficult to find such an example (try by yourself!), but still there are many of them.
This graph is interesting and important not only because of its funny combinatorics, but also because it leads to a counterexample to A.D. Alexandrov's uniqueness conjecture for smooth convex surfaces:
Let K in R3 be a smooth closed convex surface. If a constant C separates non-strictly principal curvature radii at every point of the boundary of K, then K is a ball.
This was proven by A.D. Alexandrov in [1] for analytic surfaces; however, the general case ( for smooth surfaces) stood open for a long time. The first counterexample by Y. Martinez-Maure appeared in 2001.
We explain below how the graph G leads to a counterexample to the conjecture, referring the reader to [2-5] for details.
This example illustrates a small part of the theory of hyperbolic virtual polytopes .
The below brief explanation contains no precise definitions and constructions, for which we refer the reader to [2,4,5]. Virtual polytopes are Minkowski differences of convex polytopes. They can be introduced as just formal expressions, but the key point is that the formal differences can be interpreted geometrically. Basic geometric notions for convex polytopes (such as volume, faces, outer normal fan, etc.) can be extended to virtual polytopes. In particular, it makes sense to speak of the support function of a virtual polytope.
When passing from convex polytopes to virtual polytopes, we loose convexity. Generically, a virtual polytope has a mixed type of convexity: it has a convex part (whatever this means), a concave part, and a saddle part. Virtual polytopes whose support function is saddle are called hyperbolic.
From this viewpoint, the above example presents the support function h of some hyperbolic virtual polytope K. The geometric interpretation of the virtual polytope K is is a polyhedral self-intersecting surface (Fig. 4). By construction, the graph G plays the role of the normal fan of K.
Model produced with: Maple 7 + JavaViewLib 3.95.000
| Keywords | virtual polytope; saddle surface; pointed embedding | |
| MSC-2000 Classification | 52B70 (52B10, 52C20) |
240x240 preview
Submitted: Thu Apr 17 10:06:36 CEST 2008.
Revised: Fri Mar 20 14:05:24 CET 2009, Tue Apr 21 10:05:42 CEST 2009, Thu May 7 11:21:58 CEST 2009.
Accepted: Thu Feb 18 12:13:46 CET 2010.
Saint-Petersburg Institute for Informatics and Automation RASGaiane Panina
14 line V.O., 39
Saint-Petersburg
Russia
marinakn@mail.ru
Saint-Petersburg Institute for Informatics and Automation RAS
14 line V.O., 39
Saint-Petersburg
Russia
gaiane-panina@rambler.ru
http://club.pdmi.ras.ru/~panina